站在便利店门口,你举起手机对准海报上的二维码,期待着那一声清脆的"嘀"后跳转到优惠券页面。屏幕上的对焦框来回跳动,三秒、五秒、十秒过去了——什么也没有发生。你换个角度再试,依然无果。最后只能无奈地手动输入那一串网址。
这种场景每天都在上演。二维码作为当今世界使用最频繁的数据载体之一,其可靠性被广泛信赖,但扫描失败的情况却远比大多数人想象的更为普遍。要理解为什么会失败,需要深入到二维码的内部结构,看看那些黑白色的方块究竟是如何被手机"读"懂的。
一块特殊的"围棋棋盘"
1994年,日本电装公司(DENSO WAVE)的工程师原昌宏(Masahiro Hara)面临一个看似简单却棘手的问题。当时的汽车制造业依赖条形码追踪零部件,但传统条形码最多只能存储约20个字符,远远无法满足记录零部件详细信息的需求。工厂工人不得不频繁更换条形码标签,效率低下。
原昌宏的解决方案是一个二维的点阵图形。他后来回忆说,设计定位图案(就是二维码三个角落的大方块)时,他从围棋棋盘获得了灵感。但真正让这个设计脱颖而出的,是他做的一件看似"笨拙"的工作:他和团队花了好几天时间,收集了各种印刷品上的图案和符号,统计黑白区域的比例分布。最终他们发现,印刷品中最少出现的黑白比例是1:1:3:1:1。
这个比例成为了定位图案的核心特征。正是因为这个比例在自然界和印刷品中极其罕见,扫描器才能在纷繁复杂的图像中快速准确地"锁定"二维码的位置和方向。
图片来源: scanova.io
{kind=link}
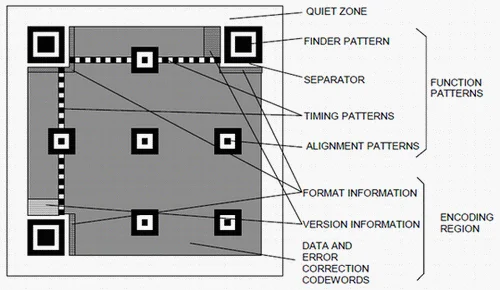
二维码并非随机排列的黑白点阵。它由多个功能区域精密组合而成:
- 定位图案(Finder Pattern):位于三个角落的7×7同心方块,提供位置和方向信息
- 定时图案(Timing Pattern):第7行和第7列的交替黑白模块,帮助扫描器确定模块大小
- 对齐图案(Alignment Pattern):较大版本二维码中的5×5小方块,用于校正透视畸变
- 格式信息:存储纠错等级和掩码图案的关键元数据
- 数据区域:实际编码信息的部分
- 静区(Quiet Zone):二维码周围至少4个模块宽度的空白区域
六步解码流程
当手机摄像头捕获一张包含二维码的图像时,解码过程大致分为六个步骤:
第一步:灰度化与二值化。原始图像被转换为灰度图,然后通过阈值处理变成纯黑白的二值图像。这个步骤看似简单,却是扫描失败的高发区域——不均匀的照明、反光、阴影都可能导致阈值选择错误,将本应是白色的区域误判为黑色,或反之。
第二步:定位图案检测。扫描器在二值图像中搜索符合1:1:3:1:1黑白比例的图案。具体做法是逐行扫描,当发现连续五个区域的宽度比例接近1:1:3:1:1时,再从该点垂直扫描验证。如果水平和垂直方向都符合这个比例,就认为找到了一个定位图案。找到三个正确定位的定位图案后,扫描器就能确定二维码的位置、大小和旋转角度。
第三步:透视校正。现实中扫描的二维码很少是完美的正方形——可能倾斜、弯曲或从斜角拍摄。扫描器通过定位图案的位置计算透视变换矩阵,将畸变的图像"拉"回正方形。这一步的精度直接影响后续解码的成功率。
第四步:读取格式信息。在二维码边缘有两份相同的格式信息(15位数据,包含纠错等级和掩码图案)。格式信息本身带有BCH纠错编码,能纠正最多3位错误。如果两份格式信息都无法正确读取,二维码就无法解码。
第五步:解除掩码。二维码生成时会对数据区域应用一种掩码图案(共8种可选),将部分模块的颜色反转。这目的是打散大面积的同色区域,让黑白模块分布更均匀。解码时需要根据格式信息中的掩码图案编号,对数据区域执行XOR操作来恢复原始数据。
第六步:Reed-Solomon纠错与数据解码。数据区域被分成若干Reed-Solomon码块,每个码块包含数据字节和纠错字节。如果码块中的错误字节数不超过纠错能力,就能完全恢复原始数据。最后,根据数据编码模式(数字、字母数字、字节、汉字等)将字节流转换为最终文本。
定位失败:最常见却最隐蔽的原因
当二维码无法扫描时,问题往往出在第二步——定位图案检测。
比例失真。1:1:3:1:1这个比例容许一定误差,但如果定位图案被拉伸、压缩或部分遮挡,比例就会超出容差范围。一张打印在曲面(如饮料瓶)上的二维码,定位图案可能变成椭圆,长宽比例发生变化。低分辨率打印会让定位图案的边缘模糊,测量比例时出现偏差。
静区缺失。ISO/IEC 18004标准明确规定,二维码周围必须有至少4个模块宽度的空白区域。这个"静区"的作用是让扫描器能够准确定位定位图案的边界。如果静区被文字、图案或其他二维码侵占,扫描器在测量1:1:3:1:1比例时就会把静区外的内容也算进去,导致比例错误。
一个常见的错误是将二维码放在彩色背景上却没有留出足够的白色边框。虽然肉眼看起来定位图案仍然清晰可见,但对于扫描器来说,定位图案的边界已经模糊不清。
定位图案被篡改。一些设计者为了美观,会将定位图案的直角改为圆角,或者在其中嵌入logo。这种改动在正常光线下可能仍能扫描成功,但在光线不足或角度不佳时就会失败。定位图案的设计是经过严格数学验证的,任何改动都会降低其识别可靠性。
透视畸变的边界
二维码的一大优势是能够从任意角度扫描——这要归功于三个定位图案提供了足够的信息来计算透视变换。但这种能力是有极限的。
当扫描角度过于倾斜时,远端的定位图案会变得很小,模块之间的边界会模糊。如果二维码印在弯曲的表面上,或者相机镜头本身有畸变,单纯的透视变换可能不足以完全校正。
高版本(数据量大)的二维码更脆弱。以版本40(177×177模块)为例,即使轻微的透视畸变,经过校正后边缘模块的位置也可能出现1-2个像素的偏差。这足以让整个解码过程失败。
对齐图案(Alignment Pattern)的作用就在于此。版本2及以上的二维码会在数据区域中放置若干对齐图案(版本40最多有6个),用于提供更多的参考点来精细校正畸变。如果这些对齐图案被损坏或无法识别,大版本二维码的扫描成功率会显著下降。
对比度的隐形成本
二维码标准允许一定程度的颜色自定义,但核心原则是:深色模块和浅色模块必须有足够的对比度。
ISO标准建议最小对比度比例约为4:1,但实践中这个数值并不够。Niemitalo在研究中指出,许多扫描器在对比度低于40%时就会开始出现问题。这里"对比度"的定义是:(浅色亮度 - 深色亮度)/ 浅色亮度 × 100%。
反色二维码的风险。很多人尝试将二维码做成白色图案在深色背景上。虽然ISO标准从2015年开始正式支持这种"反射反转",但许多旧款扫描器仍然无法识别。更麻烦的是,如果背景不是纯深色,而是带有纹理或渐变,扫描器的自动阈值算法很可能出错。
彩色二维码的陷阱。将二维码做成红色模块配浅色背景看起来很时尚,但问题是许多摄像头的红外截止滤光片会让红色看起来比实际更暗,降低对比度。黄色、橙色等暖色调也有类似问题。最保险的方案仍然是黑色模块配白色背景,或深蓝色配浅灰色。
尺寸与距离的数学
二维码扫描有一个经验法则:扫描距离与二维码尺寸的比例应保持在10:1左右。换句话说,如果二维码边长2厘米,最佳扫描距离是20厘米以内。
这个法则背后的原理涉及摄像头分辨率和模块大小的关系。假设摄像头分辨率为1200万像素(约4000×3000像素),二维码在图像中占据的画面比例决定了每个模块对应多少像素。如果二维码有100×100个模块(约版本20),要在图像中准确分辨每个模块,二维码至少应该占据图像宽度的一半左右,即2000像素,每个模块约20像素。
现实中,模块像素数低于10像素时,扫描成功率会急剧下降。低于5像素时,几乎所有扫描器都会失败。这意味着一个版本10(57×57模块)的二维码,在1200万像素摄像头上,最大可识别距离与物理尺寸的关系是:如果二维码边长5厘米,在良好光线下最多可以在约50厘米处扫描成功。
打印分辨率的影响。如果二维码是用普通打印机以300dpi打印,每个模块的物理尺寸约为0.085毫米(假设模块占据一个打印点)。这个尺寸在人眼看来清晰可辨,但对于摄像头来说可能太小了。建议二维码的最小物理尺寸不小于2厘米×2厘米,对于高版本二维码(版本20以上),建议不小于5厘米×5厘米。
Reed-Solomon纠错的边界
二维码的纠错能力是其最令人印象深刻的特性之一。根据纠错等级不同,二维码可以在受损7%到30%的情况下仍然成功解码:
| 纠错等级 | 可恢复数据比例 |
|---|---|
| L(低) | 约7% |
| M(中) | 约15% |
| Q(四分) | 约25% |
| H(高) | 约30% |
这个"可恢复数据比例"指的是整个二维码的模块数,包括数据区域和纠错区域。Reed-Solomon算法能够纠正的是"符号错误"(一个字节的整体错误),而不是随机的位错误。这意味着如果损坏是集中在一个区域(比如被贴了贴纸),纠错成功的概率比分散损坏要低得多。
Logo嵌入的计算。很多人在二维码中心嵌入logo,这利用的是纠错能力。假设一个版本10(57×57模块)的二维码使用H级纠错,总共有3249个模块,最多可以损坏约975个模块。如果logo占据二维码中心约10%的面积(约325个模块),理论上是安全的。但实践中需要留有余量——建议logo面积不超过纠错能力的三分之二。
纠错等级的选择。H级纠错虽然容错能力强,但代价是数据密度降低——同样的数据量需要更大的二维码。对于大部分应用场景,M级纠错(15%)是最常见的选择,它在数据密度和容错能力之间取得了平衡。
光线与环境的隐形杀手
扫描失败的原因有时不在二维码本身,而在环境因素。
反光。光滑纸张或屏幕表面的反光会让部分模块变得不可见。如果反光恰好覆盖了定位图案的关键部分,扫描器就无法定位二维码。解决方法很简单:调整扫描角度,让反光移开关键区域。
阴影。不均匀的照明会在二维码上投下阴影。二值化阈值算法在阴影区域可能出错,将本应是白色的区域判为黑色。自动曝光的摄像头会根据整体亮度调整参数,如果二维码只占画面一小部分且处于阴影中,曝光参数可能不正确。
运动模糊。在移动中扫描二维码是常见场景,但运动模糊会让模块边界变得模糊。对于高版本二维码,一个像素的模糊就可能导致整个解码失败。
深度学习带来的改变
传统的二维码检测依赖手工设计的特征(如1:1:3:1:1比例检测),这种方法在理想条件下效果很好,但在极端条件下容易失败。近年来,深度学习开始改变这一局面。
YOLO(You Only Look Once)等目标检测模型可以从复杂背景中直接定位二维码区域,不需要依赖定位图案。2025年发表的研究显示,基于YOLOv8的二维码检测模型在mAP50指标上达到了95.5%,显著高于传统方法。
深度学习方法的优势在于能够处理传统方法难以应对的情况:部分定位图案损坏、极端透视畸变、复杂背景干扰。缺点是需要更多的计算资源,在低端设备上可能无法实时运行。
一些现代扫码应用已经采用了混合方案:先用深度学习模型定位二维码区域,再用传统方法进行精确解码。这种方法结合了两种技术的优势,在保持高成功率的同时也保证了处理速度。
从失败到成功的诊断指南
当二维码无法扫描时,可以按照以下步骤诊断问题:
- 检查静区:确保二维码周围有足够的空白区域(至少等于定位图案边长)
- 检查对比度:深色模块和浅色模块的颜色差异应该明显,避免使用暖色调模块
- 检查尺寸:二维码物理尺寸至少2厘米×2厘米,扫描距离保持在尺寸的10倍以内
- 检查完整性:定位图案(三个大方块)不能被遮挡或修改
- 调整光线:避免反光和阴影,尝试从不同角度扫描
- 考虑环境:曲面、反光材质、户外广告牌等场景需要更高等级的纠错
二维码的设计精妙之处在于,它用极简的结构实现了极高的可靠性。但可靠性不等于完美无缺——理解它的边界条件,才能在设计和使用中避开那些隐形的陷阱。
参考资料
- DENSO WAVE. “History of QR Code.” QRcode.com, 2024.
- ISO/IEC 18004:2015. “Information technology — Automatic identification and data capture techniques — QR Code bar code symbology specification.”
- Varghese, G., & Lauck, T. (1987). “Hashed and Hierarchical Timing Wheels.” ACM SOSP.
- Reed, I. S., & Solomon, G. (1960). “Polynomial Codes Over Certain Finite Fields.” Journal of the Society for Industrial and Applied Mathematics.
- ZXing Project. “FinderPatternFinder.java.” GitHub Repository, 2024.
- Amod Malviya. “QR codes - a visual explainer.” amodm.com, 2024.
- Karrach, L., et al. (2020). “Identification of QR Code Perspective Distortion Based on Edge Directions.” Sensors.
- Blanger, G., & Hirata, S. (2019). “An Evaluation of Deep Learning Techniques for QR Code Detection.”
- Thonky.com. “QR Code Tutorial - Format and Version Information.”
- Wikipedia. “QR code.” Last modified 2024.