扫描线算法是计算几何中最优雅的算法范式之一。它的核心思想简单得令人惊讶:用一条假想的线扫过整个平面,只在关键点停下来处理。这个朴素的想法却催生了计算复杂度理论的重大突破。1976年,Michael Shamos 和 Dan Hoey 发表了标志性的线段相交检测算法,证明了扫描线结合平衡二叉树可以在 $O(N \log N)$ 时间内判断 $N$ 条线段是否存在交点——这在当时是革命性的结果。随后,Bentley 和 Ottmann 将其扩展为报告所有交点的算法,Fortune 在 1986 年用扫描线构造 Voronoi 图,这些工作奠定了计算几何作为独立学科的基础。
在 LeetCode 上,扫描线算法是解决区间问题和几何问题的通用利器。从简单的会议室调度到复杂的天际线问题,从人口统计到矩形面积并集,一脉相承。
核心思想:事件驱动的线性扫描
扫描线算法的本质是降维打击。考虑计算矩形并集面积的问题:直接处理二维平面上 $N$ 个矩形的重叠关系极其复杂。但如果想象一条竖直线从左向右扫过整个平面,问题瞬间简化了——在任意时刻,我们只需要知道这条线与哪些矩形相交,以及相交部分的长度是多少。
两个关键概念支撑着整个算法框架:
事件点(Event Points):扫描线需要"停下来"处理的位置。对于矩形面积问题,每个矩形的左边界和右边界都是事件点。对于区间问题,每个区间的起点和终点都是事件点。将所有事件点按坐标排序,扫描线依次经过这些点。
活动状态(Active Status):扫描线当前位置的"快照"。对于矩形面积问题,活动状态是当前与扫描线相交的所有 y 区间。对于天际线问题,活动状态是当前所有"活跃"建筑的高度。这个状态通常用数据结构维护,使得查询和更新都能高效完成。
图片来源: Wikipedia - Sweep line algorithm(Fortune 算法用扫描线构造 Voronoi 图的动画)
一维扫描线:区间问题的统一框架
一维扫描线处理的是数轴上的区间问题,其核心模式出奇地一致:在区间起点标记 +1,在区间终点标记 -1,然后扫描累积。
会议室 II(LeetCode 253)
给定一系列会议时间区间,求最少需要多少间会议室才能安排所有会议。
public int minMeetingRooms(int[][] intervals) {
// 使用 TreeMap 自动按时间点排序
TreeMap<Integer, Integer> timeline = new TreeMap<>();
for (int[] interval : intervals) {
timeline.put(interval[0], timeline.getOrDefault(interval[0], 0) + 1); // 会议开始
timeline.put(interval[1], timeline.getOrDefault(interval[1], 0) - 1); // 会议结束
}
int rooms = 0, maxRooms = 0;
for (int count : timeline.values()) {
rooms += count;
maxRooms = Math.max(maxRooms, rooms);
}
return maxRooms;
}
这个解法的美妙之处在于:rooms 变量在任何时刻的值,就是该时刻同时进行的会议数量。我们不需要关心具体是哪个会议开始或结束,只需要知道"有一个会议开始"或"有一个会议结束"。
时间复杂度:$O(N \log N)$,主要来自 TreeMap 的插入操作。 空间复杂度:$O(N)$,存储所有事件点。
人口最多的年份(LeetCode 1854)
给定一组人的出生和死亡年份,找出人口最多的年份。
public int maximumPopulation(int[][] logs) {
TreeMap<Integer, Integer> population = new TreeMap<>();
for (int[] log : logs) {
population.merge(log[0], 1, Integer::sum); // 出生
population.merge(log[1], -1, Integer::sum); // 死亡
}
int maxPop = 0, currentPop = 0, year = 0;
for (Map.Entry<Integer, Integer> entry : population.entrySet()) {
currentPop += entry.getValue();
if (currentPop > maxPop) {
maxPop = currentPop;
year = entry.getKey();
}
}
return year;
}
与会议室问题的结构完全相同,只是语义从"会议室数量"变成了"人口数量"。
拼车问题(LeetCode 1094)
一辆车有一定容量,给定乘客上下车的时间和人数,判断能否完成所有行程。
public boolean carPooling(int[][] trips, int capacity) {
TreeMap<Integer, Integer> passengers = new TreeMap<>();
for (int[] trip : trips) {
passengers.merge(trip[1], trip[0], Integer::sum); // 上车
passengers.merge(trip[2], -trip[0], Integer::sum); // 下车
}
int current = 0;
for (int count : passengers.values()) {
current += count;
if (current > capacity) return false;
}
return true;
}
这里的变化是:每次的"增量"不是固定的 ±1,而是上下车人数。这展示了扫描线模式的灵活性——增量可以是任意值。
我的日程安排 II(LeetCode 731)
实现一个日程安排,检测是否存在三重预订。
class MyCalendarTwo {
private TreeMap<Integer, Integer> timeline = new TreeMap<>();
public boolean book(int start, int end) {
timeline.merge(start, 1, Integer::sum);
timeline.merge(end, -1, Integer::sum);
int count = 0;
for (int c : timeline.values()) {
count += c;
if (count >= 3) {
// 三重预订,撤销本次预订
timeline.merge(start, -1, Integer::sum);
timeline.merge(end, 1, Integer::sum);
return false;
}
}
return true;
}
}
这个问题的判断条件是"累积值是否达到 3",需要在检测到冲突时撤销操作。类似地,LeetCode 732(我的日程安排 III)要求返回最大重叠次数,解法结构相同但不需要撤销操作。
删除被覆盖区间(LeetCode 1288)
给定一组区间,删除被其他区间完全覆盖的区间,返回剩余区间数量。
public int removeCoveredIntervals(int[][] intervals) {
// 按起点升序,起点相同时按终点降序
Arrays.sort(intervals, (a, b) -> a[0] != b[0] ? a[0] - b[0] : b[1] - a[1]);
int count = 0, maxEnd = 0;
for (int[] interval : intervals) {
if (interval[1] > maxEnd) {
count++;
maxEnd = interval[1];
}
}
return count;
}
这道题展示了扫描线的另一形态:不需要显式的事件表,直接在排序后的数组上"扫描"。关键洞察是:当两个区间起点相同时,终点更长的区间会"覆盖"终点更短的区间,所以按终点降序排列可以保证先处理更长的区间。
员工空闲时间(LeetCode 759)
给定多个员工的日程安排,找出所有人都有空闲的时间段。
public List<Interval> employeeFreeTime(List<List<Interval>> schedule) {
List<Interval> allIntervals = new ArrayList<>();
for (List<Interval> emp : schedule) {
allIntervals.addAll(emp);
}
// 按起点排序
allIntervals.sort((a, b) -> a.start - b.start);
List<Interval> result = new ArrayList<>();
int end = Integer.MIN_VALUE;
for (Interval interval : allIntervals) {
if (interval.start > end && end != Integer.MIN_VALUE) {
result.add(new Interval(end, interval.start));
}
end = Math.max(end, interval.end);
}
return result;
}
这道题结合了区间合并和空闲检测:先合并所有忙碌区间,再找间隙。关键是在合并过程中记录上一个区间的结束位置,当下一个区间开始时如果存在间隙就是空闲时间。
区间加法(LeetCode 370)
假设你有一个长度为 n 的数组,初始所有元素为 0。给定一系列更新操作 [start, end, inc],表示将区间 [start, end] 内的所有元素增加 inc。返回最终数组。
public int[] getModifiedArray(int length, int[][] updates) {
int[] result = new int[length];
for (int[] update : updates) {
int start = update[0], end = update[1], inc = update[2];
result[start] += inc;
if (end + 1 < length) {
result[end + 1] -= inc;
}
}
// 累积求和
for (int i = 1; i < length; i++) {
result[i] += result[i - 1];
}
return result;
}
这道题是扫描线思想在数组操作中的应用,也称为"差分数组"技术。时间复杂度从暴力的 $O(N \times K)$ 降到了 $O(N + K)$。
二维扫描线:几何问题的降维艺术
二维扫描线处理的是平面上的几何问题,需要同时在 x 和 y 两个方向上维护信息。核心思路是将二维问题分解为多个一维问题处理。
天际线问题(LeetCode 218)
给定一组建筑的左边界、右边界和高度,求城市的轮廓线。
public List<List<Integer>> getSkyline(int[][] buildings) {
List<int[]> events = new ArrayList<>();
for (int[] b : buildings) {
events.add(new int[]{b[0], -b[2]}); // 左边界,高度取负表示开始
events.add(new int[]{b[1], b[2]}); // 右边界,高度为正表示结束
}
// 按x坐标排序;x相同时,开始事件优先(高度负值更小)
events.sort((a, b) -> a[0] != b[0] ? a[0] - b[0] : a[1] - b[1]);
List<List<Integer>> result = new ArrayList<>();
PriorityQueue<Integer> heights = new PriorityQueue<>(Collections.reverseOrder());
heights.offer(0); // 地面高度
int prevHeight = 0;
for (int[] event : events) {
int x = event[0], h = event[1];
if (h < 0) {
heights.offer(-h); // 建筑开始,加入高度
} else {
heights.remove(h); // 建筑结束,移除高度
}
int currHeight = heights.peek();
if (currHeight != prevHeight) {
result.add(Arrays.asList(x, currHeight));
prevHeight = currHeight;
}
}
return result;
}
关键洞察:天际线只会在建筑边界处发生变化。用优先队列维护当前所有"活跃"建筑的高度,每次高度变化时记录关键点。
排序技巧:为什么左边界高度取负值?因为当两个事件 x 坐标相同时,我们希望:
- 高建筑开始时,矮建筑还没结束(所以开始事件优先)
- 建筑结束时,新建筑先开始再让旧建筑结束(避免出现高度降到 0 再升上去的情况)
取负值后,开始事件(负高度)会排在结束事件(正高度)前面,完美解决排序问题。
时间复杂度:$O(N^2 \log N)$(因为 PriorityQueue.remove 是线性搜索)或 $O(N \log N)$(使用 TreeMap 优化的优先队列)。
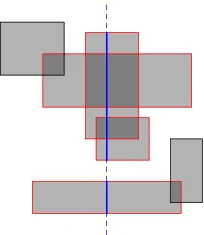
图片来源: TopCoder - Line Sweep Algorithms(扫描线计算矩形并集面积的示意图)
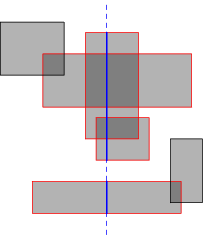{kind=link}
矩形面积 II(LeetCode 850)
给定一组矩形,计算它们的并集面积。重叠区域只计算一次。
这道题需要结合扫描线和线段树,是二维扫描线的经典应用:
class SegmentTree {
private int[] count; // 覆盖次数
private int[] length; // 实际覆盖长度
private int[] nums; // y坐标数组
public SegmentTree(int[] nums) {
this.nums = nums;
int n = nums.length;
count = new int[n * 4];
length = new int[n * 4];
}
public void update(int node, int l, int r, int ql, int qr, int val) {
if (ql > r || qr < l) return;
if (ql <= l && r <= qr) {
count[node] += val;
} else {
int mid = (l + r) >> 1;
update(node * 2, l, mid, ql, qr, val);
update(node * 2 + 1, mid + 1, r, ql, qr, val);
}
if (count[node] > 0) {
length[node] = nums[r + 1] - nums[l];
} else if (l == r) {
length[node] = 0;
} else {
length[node] = length[node * 2] + length[node * 2 + 1];
}
}
public int query() {
return length[1];
}
}
public int rectangleArea(int[][] rectangles) {
int MOD = 1_000_000_007;
List<int[]> events = new ArrayList<>();
Set<Integer> ySet = new HashSet<>();
for (int[] rect : rectangles) {
events.add(new int[]{rect[0], rect[1], rect[3], 1}); // 左边界
events.add(new int[]{rect[2], rect[1], rect[3], -1}); // 右边界
ySet.add(rect[1]);
ySet.add(rect[3]);
}
events.sort((a, b) -> a[0] - b[0]);
// y坐标离散化
List<Integer> yList = new ArrayList<>(ySet);
Collections.sort(yList);
int[] yArr = yList.stream().mapToInt(i -> i).toArray();
Map<Integer, Integer> yIndex = new HashMap<>();
for (int i = 0; i < yArr.length; i++) {
yIndex.put(yArr[i], i);
}
SegmentTree st = new SegmentTree(yArr);
long area = 0;
for (int i = 0; i < events.size(); i++) {
if (i > 0) {
int dx = events.get(i)[0] - events.get(i - 1)[0];
area += (long) dx * st.query();
}
int[] e = events.get(i);
int y1Idx = yIndex.get(e[1]);
int y2Idx = yIndex.get(e[2]);
st.update(1, 0, yArr.length - 2, y1Idx, y2Idx - 1, e[3]);
}
return (int) (area % MOD);
}
算法流程:
- 将每个矩形拆分为两个事件:左边界(添加 y 区间)和右边界(移除 y 区间)
- 将所有 y 坐标离散化,建立线段树
- 按 x 坐标处理事件,维护当前 y 方向的覆盖长度
- 每两个事件之间的面积 = y 覆盖长度 × x 距离
线段树的 count 数组记录每个区间被多少矩形覆盖,length 数组记录实际覆盖的 y 方向长度。当 count > 0 时,该区间完全被覆盖。
时间复杂度:$O(N \log N)$。 空间复杂度:$O(N)$。
完美矩形(LeetCode 391)
判断一组矩形是否能精确拼成一个大矩形(无重叠、无间隙)。
public boolean isRectangleCover(int[][] rectangles) {
long totalArea = 0;
int minX = Integer.MAX_VALUE, minY = Integer.MAX_VALUE;
int maxX = Integer.MIN_VALUE, maxY = Integer.MIN_VALUE;
Map<String, Integer> corners = new HashMap<>();
for (int[] rect : rectangles) {
totalArea += (long)(rect[2] - rect[0]) * (rect[3] - rect[1]);
minX = Math.min(minX, rect[0]);
minY = Math.min(minY, rect[1]);
maxX = Math.max(maxX, rect[2]);
maxY = Math.max(maxY, rect[3]);
// 统计每个顶点出现次数
String[] pts = {
rect[0] + "," + rect[1],
rect[0] + "," + rect[3],
rect[2] + "," + rect[1],
rect[2] + "," + rect[3]
};
for (String p : pts) {
corners.merge(p, 1, Integer::sum);
}
}
// 检查面积
long boundingArea = (long)(maxX - minX) * (maxY - minY);
if (totalArea != boundingArea) return false;
// 检查边界顶点
String[] boundingCorners = {
minX + "," + minY, minX + "," + maxY,
maxX + "," + minY, maxX + "," + maxY
};
for (String c : boundingCorners) {
if (corners.getOrDefault(c, 0) != 1) return false;
corners.remove(c);
}
// 内部顶点必须出现2次或4次
for (int count : corners.values()) {
if (count != 2 && count != 4) return false;
}
return true;
}
判断条件:
- 所有子矩形面积之和等于大矩形面积
- 大矩形的四个角顶点各只出现一次
- 其他顶点出现 2 次(边上的点)或 4 次(内部的点)
这个方法的精妙之处在于:通过顶点出现次数的模式,间接判断是否存在重叠或间隙。如果存在重叠,某些内部点会出现超过 4 次;如果存在间隙,边界点的出现次数会不符合预期。
时间复杂度:$O(N)$。 空间复杂度:$O(N)$。
下落的方块(LeetCode 699)
模拟方块依次下落,返回每次下落后的最大高度。
class SegmentTreeNode {
int start, end, mid, value, lazy;
SegmentTreeNode left, right;
SegmentTreeNode(int start, int end) {
this.start = start;
this.end = end;
this.mid = (start + end) >> 1;
}
}
class SegmentTree {
SegmentTreeNode root = new SegmentTreeNode(0, (int)1e9);
void pushDown(SegmentTreeNode node) {
if (node.left == null) node.left = new SegmentTreeNode(node.start, node.mid);
if (node.right == null) node.right = new SegmentTreeNode(node.mid + 1, node.end);
if (node.lazy != 0) {
node.left.value = node.right.value = node.lazy;
node.left.lazy = node.right.lazy = node.lazy;
node.lazy = 0;
}
}
void update(int l, int r, int val, SegmentTreeNode node) {
if (l > r || node == null) return;
if (node.start >= l && node.end <= r) {
node.value = val;
node.lazy = val;
return;
}
pushDown(node);
if (l <= node.mid) update(l, r, val, node.left);
if (r > node.mid) update(l, r, val, node.right);
node.value = Math.max(node.left.value, node.right.value);
}
int query(int l, int r, SegmentTreeNode node) {
if (l > r || node == null) return 0;
if (node.start >= l && node.end <= r) return node.value;
pushDown(node);
int result = 0;
if (l <= node.mid) result = Math.max(result, query(l, r, node.left));
if (r > node.mid) result = Math.max(result, query(l, r, node.right));
return result;
}
}
public List<Integer> fallingSquares(int[][] positions) {
List<Integer> result = new ArrayList<>();
SegmentTree tree = new SegmentTree();
int maxHeight = 0;
for (int[] pos : positions) {
int left = pos[0], size = pos[1];
int right = left + size - 1;
int h = tree.query(left, right, tree.root) + size;
maxHeight = Math.max(maxHeight, h);
result.add(maxHeight);
tree.update(left, right, h, tree.root);
}
return result;
}
算法思路:
- 对于每个下落的方块,先查询它覆盖区间的当前最大高度
- 新高度 = 当前最大高度 + 方块边长
- 更新区间内所有位置的高度为新高度
- 记录全局最大高度
使用带懒惰传播的线段树,支持区间查询最大值和区间更新。懒惰传播确保更新操作只在必要时下推,避免不必要的递归。
时间复杂度:$O(N \log M)$,其中 $M$ 是坐标范围。 空间复杂度:$O(N)$(动态开点线段树只创建必要的节点)。
扫描线算法的统一视角
回顾这些题目,可以发现一个统一的模式:
$$ \text{答案} = \sum_{\text{事件区间}} (\text{区间长度} \times \text{区间状态}) $$对于一维问题,“区间长度"是时间跨度,“区间状态"是累积计数。
对于二维问题,“区间长度"是 y 方向的覆盖长度,“区间状态"是 x 方向的跨度。
复杂度分析
| 问题类型 | 时间复杂度 | 空间复杂度 | 核心数据结构 |
|---|---|---|---|
| 一维区间问题(TreeMap) | $O(N \log N)$ | $O(N)$ | TreeMap |
| 天际线问题 | $O(N \log N)$ | $O(N)$ | 优先队列 |
| 矩形面积并集 | $O(N \log N)$ | $O(N)$ | 线段树 |
| 完美矩形 | $O(N)$ | $O(N)$ | HashMap |
| 下落的方块 | $O(N \log N)$ | $O(N)$ | 动态开点线段树 |
核心技巧总结
- 事件点提取:找出所有需要处理的"关键时刻”
- 事件排序:按坐标排序,相同坐标时注意处理顺序
- 状态维护:选择合适的数据结构维护活动状态
- 增量计算:只在事件点之间进行计算,避免逐点遍历
扫描线算法的魅力在于:将 $O(N^2)$ 甚至 $O(N^3)$ 的暴力解法,优雅地降维到 $O(N \log N)$。这不仅是技巧,更是一种思维方式——不要试图同时处理所有信息,而是让信息有序地"流过"你的算法。
从 Shamos 和 Hoey 1976 年的开创性工作,到今天 LeetCode 上的各类变体,扫描线算法始终是计算几何和区间处理的基石。掌握它,就掌握了将复杂问题"线性化"的核心思想。